


A livello mondiale la zootecnia bovina da latte è caratterizzata da una molteplicità di soluzioni gestionali legate alle peculiarità dei singoli Paesi e dei mercati di consumo cui il latte è conferito. Esiste, tuttavia, una tendenza comune all’incremento delle dimensioni aziendali sotto la spinta delle economie di scala. Questo ha portato ad una revisione del ruolo dell’allevatore che si trova a fronteggiare da un lato la crescente enfasi sugli standard di qualità del latte prodotto, dall’altro la necessaria garanzia di sicurezza della stalla, per operatori ed animali.
Man mano che le aziende agricole aumentano le dimensioni delle loro mandrie e modernizzano le pratiche di produzione, garantire gli standard qualitativi e la sicurezza dell’ambiente di lavoro diventa vitale, a livello globale, per il successo delle produzioni lattiero-casearie (Douphrate et al., 2013). L’ampliamento di dimensione delle mandrie ha imposto un ricorso sempre più ampio alla meccanizzazione di operazioni fondamentali quali, in particolare, alimentazione e mungitura.
Nelle aziende dotate di sale di mungitura convenzionali, le vacche sono alimentate e munte secondo routine ormai consolidate. Nella maggior parte dei casi, l’alimentazione si avvale della tecnologia unifeed grazie all’adozione quasi generalizzata dei carri miscelatori.
Quando invece la mungitura è svolta con sistemi automatici (Ams, automatic milking system), alle bovine si somministra un’integrazione alimentare sotto forma di concentrati studiati anche come mezzo per attirarle al sistema di mungitura.

Il passaggio ad un sistema di mungitura automatico, tuttavia (Fig. 1), rappresenta ben più che il ricorso ad un semplice supporto tecnologico allo svolgimento di quest’operazione; la frequenza di mungitura nell’Ams, infatti, dipende non solo dalla produttività individuale e dall’offerta nutrizionale, ma anche da molti altri aspetti tra cui la struttura sociale della mandria, la progettazione del layout della stalla, il tipo di percorso imposto alle vacche, lo stato di salute delle stesse con particolare riferimento all’eventuale presenza di patologie podali (Bach et al., 2018). Ne consegue, dunque, un’intrinseca connessione fra fase di alimentazione e di mungitura che mostra come l’innovazione dell’una non possa che avere positiva correlazione con l’innovazione dell’altra.

La tendenza attuale è quella di individuare soluzioni automatiche integrate, tra cui quelle per la preparazione dell’unifeed (Fig. 2), che interagiscano tra di loro e che potranno rappresentare un radicale cambiamento nel settore in cui l’internet delle cose potrebbe riguardare i principali sistemi di governo della mandria e della struttura edilizia (alimentazione, mungitura, pulizia, microclima, illuminazione, aspetti sanitari, ecc.).
Sistemi automatici di alimentazione, Afs
L’alimentazione automatica delle razioni unifeed, o Afs (automatic feeding systems), sta acquisendo un’importanza crescente nell’allevamento dei bovini da latte. Questo sistema di alimentazione consente, infatti, di aumentare la frequenza di distribuzione con l’ausilio di dispositivi di ridotta portata o volume (nastri di distribuzione, robot di alimentazione su rotaia o semoventi) svincolando l’operatore dalle operazioni di preparazione e distribuzione; quest’ultimo dovrà limitarsi, infatti, a garantire la disponibilità degli ingredienti di base all’interno di un locale definito “cucina” dove il robot distributore andrà a rifornirsi.
L’incremento della frequenza di alimentazione è molto ben accettato dalle bovine che incrementano la quantità giornaliera di alimento assunto senza modificare significativamente il tempo dedicato alla ruminazione (Grothmann et al., 2014).
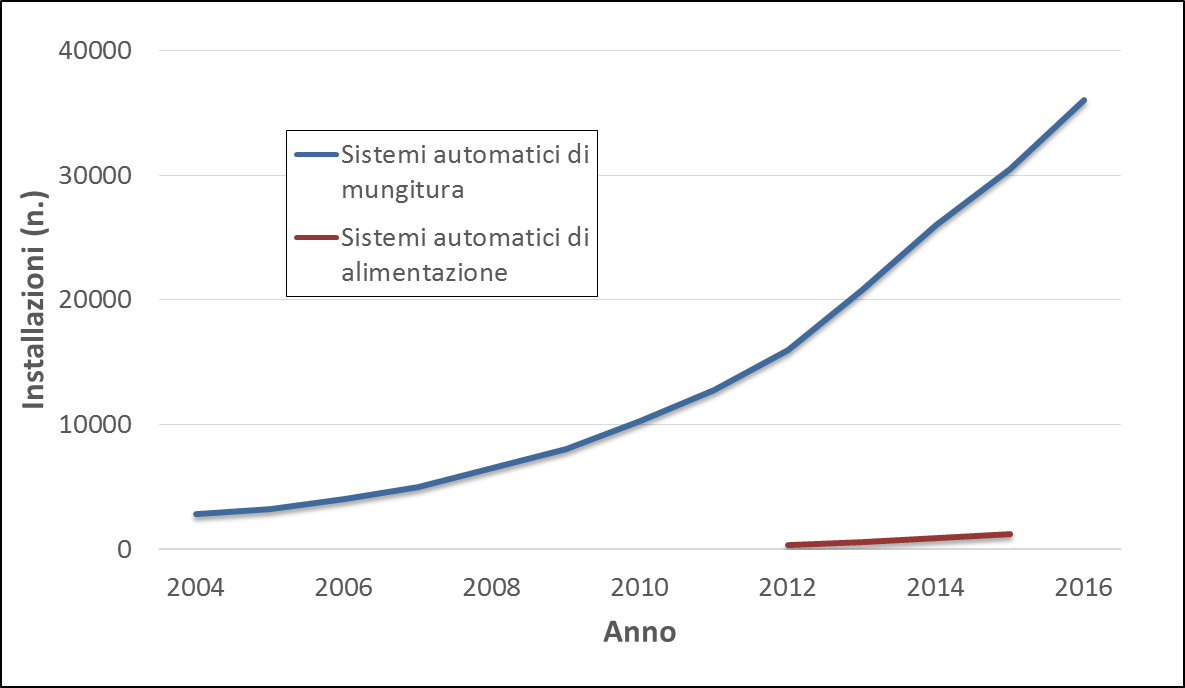
Lo sviluppo di sistemi di alimentazione totalmente automatici è iniziato intorno all’anno 2000, ma l’immissione dei primi modelli per l’unifeed sul mercato è avvenuta nel 2004 e sta gradualmente diffondendosi (Fig. 3).
Un sistema automatico di distribuzione è composto essenzialmente da due elementi chiave: la cosiddetta “cucina” (Fig. 4) e il carro distributore.
La prima è rappresentata da un ambiente coperto adiacente alla stalla in cui sono stoccate le materie prime che compongono la razione: qui, tramite sistemi automatici di approvvigionamento (gru auto-caricanti oppure container auto-scaricanti), i diversi componenti della razione sono pesati e immessi nel carro distributore. Quest’ultimo, che in certi allestimenti può essere un vero e proprio carro miscelatore, con diverse modalità viaggia, anche autonomamente (Reger et al., 2018), dalla cucina alla corsia di foraggiamento provvedendo non solo alla distribuzione dell’unifeed, ma anche all’avvicinamento della razione alla corsia di alimentazione.


Fig. 4 – Esempi di cucine basate su container (a sinistra) o su gru per il carico del robot distributore dell’unifeed.
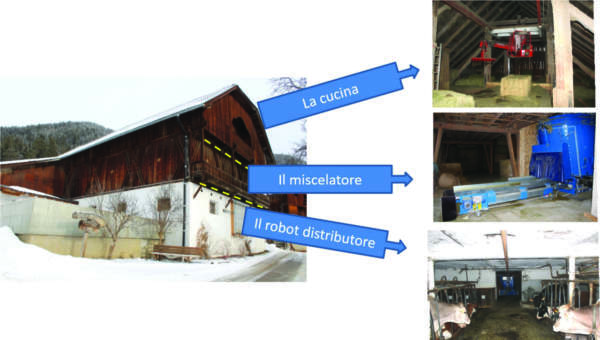
Punto di forza di questa tecnologia, attualmente in un momento di iniziale diffusione nel nostro Paese a partire dal 2012, è l’estrema flessibilità ed adattabilità alle variabili condizioni di allevamento così da renderne favorevole l’adozione non solo in realtà intensive e con mandrie numerose, ma anche in piccole realtà produttive site in zone strategiche per la zootecnia da latte come le zone collinari e di montagna (Fig. 5).
Inoltre, anche gli aspetti energetici ed ambientali sembrano destare interesse in quanto tali sistemi sono azionati elettricamente e pertanto, grazie alla possibilità di autoapprovvigionamento energetico con fonti rinnovabili (biogas, eolico, fotovoltaico) e ai minori consumi, è possibile la riduzione del conto energetico annuo del 25-35%.
Sistemi automatici di mungitura, Ams
Lo sviluppo di questo tipo di innovazione tecnologica deriva dalla diffusione dell’elettronica che negli anni ’70 ha riguardato massicciamente anche le tecnologie per l’agricoltura consentendo di concepire la mungitura come un processo personalizzato che considera animale, macchina e ambiente stabulativo nel loro insieme favorendo nel contempo il benessere e le condizioni sanitarie (Goulart, 2014).
Ricorrere alla mungitura robotizzata implica, infatti, non solo l’estrazione di latte senza l’impiego di lavoro umano, ma introduce delle strategie di gestione individuale riconducibili a: 1) monitoraggio dell’utilizzo giornaliero del box e dell’assunzione di concentrato da parte di ogni singolo animale; 2) possibilità di variazione della frequenza di mungitura in funzione della produzione individuale di latte.
A partire dalla prima introduzione commerciale (1992), la mungitura automatica è diventata sempre più popolare ed è stato stimato che entro il 2020 fino al 50% delle vacche allevate in ricoveri di nuova costruzione saranno munte con questa modalità (Ue, 2014). L’interesse dell’industria, della ricerca e degli allevatori nei confronti del robot di mungitura è stato da subito elevato portando allo sviluppo di diversi progetti.

Le tipologie di Ams sono oggi, essenzialmente, quattro. In alcune di esse, la possibilità di condividere lo stesso braccio robotizzato consente di espandere la capacità operativa del robot senza incrementare linearmente i costi. Sono inoltre presenti sistemi rotativi per le mandrie di dimensioni maggiori (Fig. 6).
La straordinaria tendenza verso l’automazione dell’allevamento bovino da latte (mungitura, alimentazione, pulizia, climatizzazione, illuminazione, ecc.) e l’inevitabile direzione da intraprendere verso significative condizioni di benessere-sostenibilità-salute dovrebbero portare a progettare in modo radicalmente nuovo gli edifici zootecnici che andrebbero intesi sempre più come un sistema complesso.
Poiché il successo della mungitura robotizzata dipende dal desiderio delle bovine a visitare volontariamente il box di mungitura, il primo obiettivo da perseguire è quello di creare percorsi i più agevoli possibili, brevi, esenti da barriere e con pavimenti in ottime condizioni affinché gli animali si possano spostare dalle zone di riposo o di alimentazione verso quelle di mungitura senza particolari difficoltà. A questo si aggiunge il lavoro dei costruttori di robot che tendono a migliorare sempre di più la facilità di accesso e uscita dal box (Fig. 7) cercando di favorire il più possibile i movimenti delle bovine.

Anche gli spazi attorno al robot devono essere sufficientemente ampi per non creare sovraffollamenti o difficoltà di transito, così come le intersezioni e i passaggi attraverso le file di cuccette devono essere sufficientemente larghi e numerosi in modo da non obbligare gli animali a compiere lunghi percorsi.
Anche per quanto riguarda l’ubicazione del box di mungitura l’obiettivo principale da perseguire è rappresentato dalla facilità con cui le bovine possono visitarlo.
Nel caso di robot con box singolo, la collocazione ideale prevede il suo posizionamento in una delle testate dell’edificio dove sarà possibile ricavare un’area di dimensioni sufficienti, mentre nel caso di più postazioni singole oppure di box doppi o multipli, la collocazione ideale è al centro della stalla al fine di ridurre al minimo le distanze da percorrere.
Robot di mungitura, il traffico
Infine, un altro aspetto importante da considerare in una stalla robotizzata è il cosiddetto “traffico” degli animali. Infatti, se consideriamo la stalla robotizzata come una sorta di self-service dove gli animali possono decidere di quale dei tre servizi “offerti” (mungitura, alimentazione, riposo) possono di volta in volta usufruire, si tratta di capire se è opportuno stabilire delle “regole” che impongano in quale ordine (prima l’alimentazione o prima la mungitura?) vogliamo che ciò avvenga. Ovviamente, non essendoci allevamenti uguali tra di loro e quello che funziona per il vicino può non funzionare per noi, non esiste una soluzione unica, ma ci sono alcune opzioni che andranno pianificate attentamente, caso per caso, prima dell’acquisto.
Traffico libero. La prima e più diffusa strategia è quella del “traffico libero”: nessun limite viene posto alle bovine che decidono liberamente come muoversi all’interno dell’edificio. È anche quella ad investimento minore in quanto non è necessario installare recinzioni e cancelli automatici di preselezione supplementari. Tuttavia, con questa strategia possono verificarsi numerosi “rifiuti” da parte del robot nei confronti di quelle bovine che tendono a visitare molte volte il box, attratte dal mangime concentrato.
Traffico controllato. La seconda strategia è quella a “traffico controllato”: l’obiettivo è quello di “bilanciare” i desideri delle bovine con le esigenze di gestione dell’allevatore. Con questa strategia gli animali sono liberi di recarsi in mangiatoia ma, nel ritorno verso le cuccette, solo quelli che devono essere munti vengono indirizzati, per mezzo di cancelli di preselezione, al box di mungitura.
Traffico forzato. Infine, la terza strategia è quella a “traffico forzato” in cui, con l’obiettivo di massimizzare il controllo sulle visite al box da parte degli animali, questi, per potersi recare in mangiatoia, sono obbligati a transitare da un’area di attesa e preselezione posta di fronte al box di mungitura che devierà gli animali da mungere verso il robot. Con queste due ultime strategie anche le bovine più “pigre” sono obbligate a passare dal box di mungitura riducendo la necessità da parte dell’allevatore di individuarle e condurle manualmente alla mungitura.
Robot di mungitura, il benessere
L’adozione di un sistema automatico di mungitura è un passaggio molto importante dal punto di vista dell’organizzazione aziendale che si ripercuote su molteplici aspetti. Infatti, oltre ad un miglioramento globale della qualità del lavoro di chi opera quotidianamente a contato con gli animali, è stato riportato un significativo miglioramento delle condizioni di benessere degli animali medesimi (Tse et al., 2018).
Un ruolo fondamentale resta quello coperto dall’allevatore: le sue scelte, prima ancora che sul profitto dell’impresa, influenzano la frequenza con cui le bovine visitano l’Ams con positivi riscontri in termini di qualità e quantità delle produzioni (Siewert et al., 2018; Sannino et al., 2018; Salfer et al., 2017; Pezzuolo et al., 2017; Priekulis et al., 2017). Da non sottovalutare, infine, la possibilità di monitorare costantemente lo stato di salute delle bovine grazie all’integrazione dei robot di mungitura con sensoristica specifica (King et al., 2018; Khatun et al., 2018).
Analisi dei dati aziendali
In conclusione, è difficile prevedere come evolveranno le tecnologie per l’automazione; quello che sembra certo, invece, è la possibilità che tali tecnologie serviranno sempre più non solo per ridurre il lavoro più gravoso per l’uomo, ma anche per migliorare le condizioni produttive e di benessere degli animali grazie a dotazioni strumentali e sensoristiche in grado di monitorare sempre più aspetti fisiologici (ormoni, comportamenti, espressioni, ecc.) e utilizzando applicazioni di intelligenza artificiale per individuare precocemente situazioni anomale, patologiche o di stress in modo da intervenire sempre più preventivamente.
L’analisi dei dati aziendali, quindi, diventerà importante non solo per migliorare l’efficienza dell’allevamento, ma anche per pianificarne i progressi futuri, ripensando l’organizzazione dell’attività di allevamento per far fronte, nel migliore dei modi, alle sfide imminenti non solo a livello produttivo, ma anche ambientale e sociale.
La bibliografia è consultabile contattando gli autori.
Gli autori sono del Crea - Centro di ricerca Ingegneria e Trasformazioni agroalimentari, sede di Treviglio (Bg).












{kind=link}